Dans les précédents articles, les études ont porté dans un premier temps sur la réalité de la navigation d’un Foiler et la découverte de l’AC75 avec principalement le passage de la configuration Archimédienne à la configuration Foiler pour analyser par la suite les paramètres de vol de l’AC 75 Néo-Zélandais.
A la suite de quoi nous avons passé au crible la flotte composée d’un Defender et de trois Challengers. La première confrontation sur l’eau étant lors de l’America’s Cup World Series qui se disputera à Cagliari durant quatre jours en Avril 2020.
Nous allons maintenant vous proposer dans ce nouvel article, écrit par Jean Sans, Expert Maritime et Robert Lainé, ancien Directeur Technique d’Airbus, deux analyses sur les Foilers :
I – L’homme confronté à la technique du pilotage des Foilers (Jean SANS 18/03/2020)
II – Méthodologie de développement du pilote automatique d’un voilier type « Foiler » (Robert LAINÉ 18/03/2020)
I – L’HOMME confronté à la TECHNIQUE de LE PILOTAGE des FOILERS (J. SANS)
1- Préambule
Sur un « bon vieux » voilier Archimédien, même à pleine vitesse sur des surfs sous spinnaker asymétrique par 35 nœuds, il suffit de 3 cerveaux : Le barreur, l’équipier à la Grand-Voile et celui qui est à l’écoute de spinnaker.
Le barreur ressent son bateau sous ses pieds (ou sous son cul, s’il est assis) et au toucher de barre (molle, dure, neutre…)
Les deux équipiers perçoivent la vitesse, lisent les pennons, le refus du bord d’attaque du spinnaker… autant d’informations visuelles, physique qui sont automatiquement traduites en réaction : angle de barre, choquer, border etc.
Sur un petit bateau, le reste de l’équipage peut contribuer à conserver une gîte qui limite la dissymétrie de la carène.
Mais dans tout cela, point de connexion électronique, juste un sens marin très développé.
Et si une faute est commise, généralement une anticipation avec un peu en retard, il est souvent possible de la réparer. Il peut aussi arriver que la récupération soit impossible.


En fait en Archimédien, le temps disponible entre la perception, la décision et l’action est suffisamment grand pour que le système fonctionne. La vitesse du bateau, qui reste raisonnable, bien que 16, 20 nœuds paraissent la quintessence, contribue à rendre le pilotage possible par l’homme.
Les pilotes automatiques, de plus en plus sophistiqués s’en sortent pas mal, dans le sens où ils assurent la poursuite fiable d’un cap.
En fait il faut dissocier deux choses lorsque l’on suit une route (un cap). Il y a l’objectif final : le cap à suivre pendant « x heures » et la performance du bateau à l’instant « t ».
Si le pilote convient très bien pour l’objectif « Cap », on sait que le barreur est bien meilleur pour obtenir la quintessence de son bateau à chaque longueur parcourue. Ce sont que des dixièmes de nœuds mais c’est important en régate.
Le pilotage d’un voilier Archimédien est plus facilement contrôlable (homme et/ou machine[1]) parce que le bateau évolue en deux dimensions et que sa forme en tant que modèle hydrodynamique lui fournit une stabilité de route plus facilement contrôlable.
Avec un Foiler, on change de monde et surtout d’environnement, puisque le « bateau » quitte l’environnement Archimédien pour entrer dans un environnement totalement discontinu.
Pour un Foiler, on se base beaucoup sur le Vol des avions.
[1] Par le mot « machine », il faut comprendre : pilote automatique, des capteurs électroniques, etc.
En théorie, les équations de vol sont identiques pour un avion comme pour un Foiler, avec toutefois une différence majeure qui se trouve être le milieu dans lequel l’élément sustentateur évolue.
Les ailes de l’avion se trouvent en permanence dans un milieu continu (l’air : 1.025 kg/m3), les foils du Foiler rencontrent un fluide totalement discontinu qui passe de l’eau homogène à de l’eau contenant des bulles d’air et même au remplacement de l’eau par l’air, ce qui perturbe l’écoulement et la portance du profil du foil.
Le ratio de 1000 entre l’air 1.025kg/m3 et l’eau 1025 kg/m3 constitue un « obstacle » incontrôlable à 100%.
Ensuite le Foiler introduit une dimension complémentaire : l’altitude de vol. On passe en évolution 3D, c’est-à-dire que l’on se trouve obligé de contrôler 6 degrés de liberté (3 translations et 3 rotations) alors qu’en mode Archimédien (2D) on ne gère que 4 degrés de liberté (2 translations et 2 rotations).
Certes en Archimédien le bateau « monte et descend », mais il le fait « au gré de l’état de la mer », ce qui est incontrôlable.
En réalité en 3D, seul les contrôles directs des 3 rotations (Tangage, Roulis, Lacet) et de la translation verticale (Altitude de vol) sont nécessaires. En effet la translation latérale correspond à la dérive qui est incontrôlable et la translation longitudinale relève de la vitesse et du cap à suivre.
Le mode « Vol », possède un corolaire qui est de conserver une altitude la plus constante possible.
Cette stabilité en altitude repose sur la portance des ailes (foils).
Cette portance dépend de deux paramètres :
- La vitesse dans le fluide (eau pour un foil)
- La portance du profil des foils, cette dernière s’écroulant brutalement dès que l’angle d’incidence du foil flirte avec le 12 ou 15°.
Ajoutons que deux phénomènes parasites : la ventilation et la cavitation peuvent instantanément réduire la portance à « zéro », pour peu que les conditions physiques soient réunies.
Cet écroulement instantané de la portance est lié au fait que les Foils évoluent dans un milieu discontinu.
2- L’Homme ou la Machine
L’homme est-il capable de piloter un Foiler ?
Ce qui est certain et admis, c’est que le pilotage « manuel » ne peut plus se faire sans assistance technique (efforts nécessaires pour la manœuvre des appendices, des voiles, etc.).
Ce qui est aussi certain, c’est que plus la vitesse est importante, plus le temps de pilotage durant lequel l’attention du pilote (mais aussi de l’équipage) est maximale est court.
Ce qui est aussi vrai, c’est que piloter un Foiler ne sera pas ouvert à tout le monde.
Pour prendre un exemple plus courant : Piloter un Foiler revient à conduire à grande vitesse sur une route verglacée ou l’anticipation en termes de pilotage représente la clef de la trajectoire de la voiture.
Un retard décisionnel de 0.1 (ou même moins) seconde suffit pour toucher la barrière de sécurité !
Le pilotage d’un Foiler est un enchainement de séquences :
Manœuvre d’empannage sur la route à suivre : la vitesse du vent apparent chute, de fait la vitesse du Foiler chute aussi, donc la portance du foil diminue et l’altitude de vol décroit.
Réaction, le pilote (ou l’équipage) augmente la cambrure du profil du foil (avec le Flap) ou l’incidence du foil, la portance revient, le Foiler reprend de l’altitude MAIS l’empannage termine sa transition, le nouveau cap redonne du vent apparent ET comme la cambrure (ou l’incidence) est élevée, la portance du foil « explose » (carré de la vitesse), le Foiler est subitement sustenté… comme simultanément l’assiette a été contrôlé avec le PHR… ce dernier sort de l’eau et le bateau plonge dans la mer… se bloque irrémédiablement.
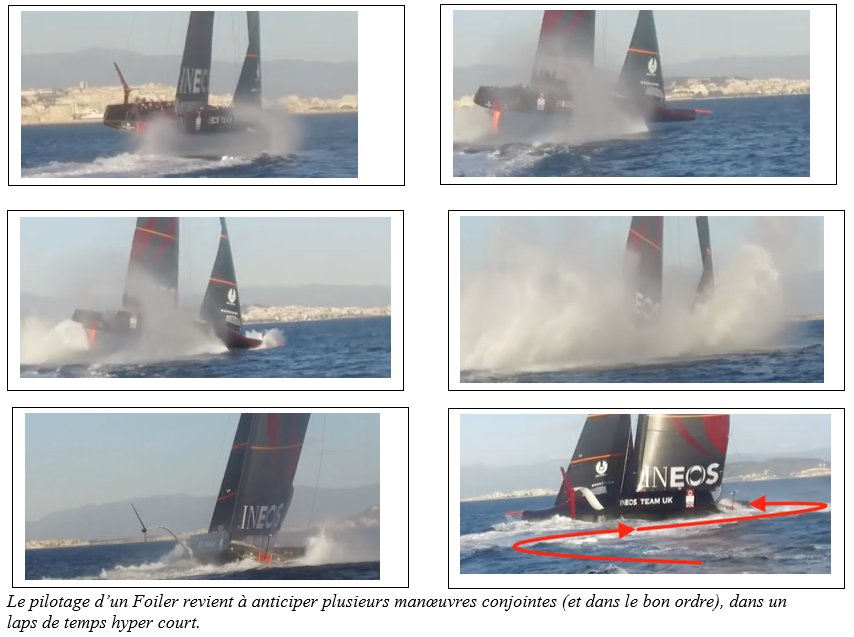
L’enchainement des évènements tel qu’ils sont présentés ci-dessus, parait confus, mais c’est volontaire, afin de montrer que toutes ces manœuvres et décisions se déroulent en moins de 2 secondes… durant ce laps de temps, le cerveau doit identifier, quantifier, hiérarchiser des informations de très faibles intensités (accélérations en 3D, angles, etc.), les interpréter et décider des opérations à réaliser immédiatement en les ajustant en permanence à la configuration du moment (boucle fermé).
Les dernières vidéos de AMERICAN MAGIC ou de INEOS (ci-dessous)
A priori en régate, remplacer l’homme par la machine parait aberrant, car autant faire des régates avec Virtual Skipper. Pourtant la complexité du Foiler amènera à accepter cette aide.
En fait, toute cette analyse met en évidence que bien que l’Homme ne soit pas intrinsèquement le point faible des « sorties de route », elle montre simplement que dans le temps impartit par la vitesse de l’engin, il est impossible à l’Homme de gérer les décisions et manœuvres appropriées. Non pas qu’il ne sache pas comment faire, mais ses moyens sensoriels ne lui permettent pas de dominer la situation.
Par exemple, le cerveau humain perçoit très mal les accélérations dans un plan horizontal. L’important n’est pas la perception de la vitesse par elle-même, mais la perception de l’instant ou le Foiler commence son accélération (ou sa décélération). Cette perception de l’accélération, sera l’origine d’une série d’action à engager afin que les équations de vol à venir restent opérantes.
Si le pilote ne perçoit pas ou alors identifie cette accélération avec un très léger temps de retard, les actions mise en œuvre ne s’opposeront pas à une sortie de route.
Mais identifier l’accélération ne suffit pas, encore faut-il que son identification corresponde ou s’intègre dans une manœuvre structurée, qui correspond à des équilibres en vol à venir dans les secondes qui suivent.
Ce qui sous-entend l’existence d’un domaine de vol prédéfini lié à cette manœuvre.
A cet instant la « Machine » intervient.
3- Le Pilotage d’un Foiler
Avant de parler de pilotage il faut préciser ce que l’on entend par « pilotage ».
Il y a trois modes possibles de pilotage :
- Le pilotage manuel assuré par un barreur et des équipiers. Ce type de pilotage concerne l’instant « t », il optimise les performances du bateau en fonction du vent à l’instant et de l’état de la mer rencontré et en maintenant une altitude et une assiette de vol correcte. Le cap à suivre est sous-jacent dans le sens ou il reste l’objectif global. Cela signifie que le cap à un instant peut être différents du « cap objectif ». Ce type de pilotage convient pour certaines utilisations de Foilers et reste limité à des bateaux de petites dimensions.
- Le pilotage manuel assisté. Il faut entendre par « assisté » une assistance intellectuelle, c’est-à-dire une aide à l’analyse, à la décision et à l’action.
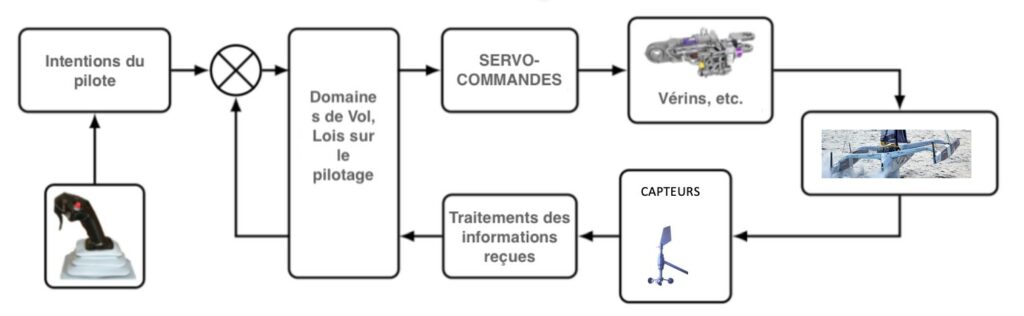
Les ordres donnés par le pilote vers les actionneurs des appendices transitent par un calculateur qui impose ses propres actions permettant d’assurer le contrôle de la plateforme (voir organigramme en page suivante). On parle de « Boucle Court Terme ».
La « Boucle Court Terme » génère un pilotage fin, longueur après longueur de bateau.
L’assistance fournie peut être graduée en fonction des prescriptions sportives.
Le pilotage automatique assure la gestion du Cap[1] imposé ET le vol à une altitude choisie la plus constante possible, sans pour autant optimiser les performances du bateau. On parle alors de « Boucle Long Terme ».
3-1 Le pilotage Manuel assisté
Actuellement les Foilers sont plus ou moins équipés de systèmes d’assistance au pilotage.
Dans le domaine de l’assistance continue (asservissement du Foil central), le plus abouti est le Moth. Mais la technique utilisée sur ce monocoque Foiler n’est pas transposable sur un Foiler offshore, ou même sur un AC75 à cause de l’effet d’échelle.
En effet sur un Moth le skipper pèse plus lourd que le bateau, il peut donc jouer le rôle d’un funambule pour maintenir le centrage du poids idéal et ajuster manuellement avec le Plan Horizontal Arrière.
L’idée est donc de concevoir une sorte de « shadow » système qui agit entre les ordres du pilote et les informations fournies par les capteurs vers les commandes des actionneurs des appendices afin d’arriver à obtenir l’objectif souhaité.
Il faut comprendre que ce système ne pilote pas le bateau (au sens de cap global à suivre), mais assiste le skipper dans ses décisions sur tous ces courts moments qui se suivent et se répètent d’ailleurs à l’infini pour maintenir le Foiler en Vol (réglage des voiles, réglage des flaps, réglage du PHR).
Ce système devient un « directeur de vol ».
Il est indépendant de la trajectoire générale (par exemple le cap pour aboutir à un waypoint distant de 50 ou 200 milles). Sa fonction est, si on simplifie, de maintenir le Foiler au-dessus de l’eau à une altitude la plus constante possible.
Il devra gérer :
- Des éléments mécaniques qui contrôlent la Micro-Trajectoire[2] (évolution en 3D)
- La puissance du « Moteur » : vitesse du Foiler (soit la vitesse du fluide qui passe autour des Foils).
- Le Lift des foils : la portance disponible.
Ces 3 paramètres possèdent chacun des arborescences, liées entre elles par des « ponts ».
C’est cette osmose qui rend le « directeur de vol » très complexe.
Dans la pratique que devient la relation entre le pilote et le « Directeur de Vol » ?
Le directeur de vol assiste le pilote dans sa tâche de pilotage en mode manuel assisté.
Ainsi, lorsque le pilote lance sur une route définie (cap), une manœuvre et/ou une modification de trajectoire à un instant « t », il n’agit pas directement sur ces actionneurs (flaps, vérins, etc.) mais il fournit au « directeur de vol » une intention qui peut être : un cabré, un piqué, une modification très temporaire de la route, une modification de puissance, etc.
Cette intention est analysée par le « directeur de vol », comparée aux domaines possibles de vol du Foiler, aux conditions extérieures de l’instant, aux paramètres instantanés de vol du Foiler. A l’issue de l’analyse, les informations sont envoyées aux appendices, au contrôle de la puissance.
Le système est tel que les résultats sont comparés en permanence aux consignes à atteindre (boucle fermée) et tout cela s’enchaine, s’adapte au fur et à mesure que le Foiler se déplace en 3D (Vol).
Il me semble clair que très rapidement les Foilers seront pilotés activement par des processeurs. Pour le moment c’est pratiquement interdit par les règles de course et de classe, mais vu le gain de vitesse et surtout de sécurité à attendre de l’automatisation du pilotage des Foilers, ce n’est qu’une question de temps avant que ces barrières tombent.
L’Ultim « Edmond de Rothschild » s’est déjà affranchi des règles de la classe Ultime, d’autres suivront. Coté America Cup (AC), ce type de pilotage assisté est interdit en course, mais il a été utilisé pour mettre au point les algorithmes de pilotage et entraîner les équipages à essayer de faire aussi bien que le processeur !
Comment le pilote agit ?
On peut imaginer de multiples systèmes.
En aéronautique on demande au pilote de suivre l’imagerie renvoyée sur un écran en agissant sur le « manche ».
Un exemple d’écran de contrôle « aviation »
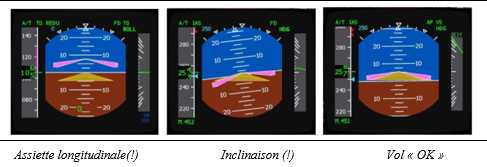
Cela parait simple, la réalité est quand même plus complexe car le paramètre puissance (c’est-à-dire la vitesse) disponible est très difficile à maitriser. Il n’y a pas de manette de gaz sur un voilier.
En effet, la force propulsive vélique découle de la projection sur la trajectoire du Foiler, du vecteur portance vélique des voiles.
Ce vecteur propulsif est potentiellement moins important que la portance aérodynamique de la voile qui dans le cas d’un Foiler travaille en régime laminaire.
Cela rend le Foiler sous motorisé, malgré une surface de voile importante. Une grande partie de le portance aérodynamique est « convertie » en dérive (d’où le risque de chavirage).
3-2 Le pilotage en mode « pilote automatique (PA) »
En mode pilotage automatique, le skipper passe théoriquement intégralement la main à la « machine ».
Le skipper fixe trois paramètres :
- Le Cap
- La Vitesse
- L’altitude vol
En pratique fixer le Cap et le tenir ne pose pas de problème. Les Pilotes Automatiques existants réalisent très bien cette fonction.
C’est beaucoup plus compliqué pour que le pilote automatique respecte la Vitesse et l’Altitude de Vol.
Avec ces deux paramètres étroitement liés, la nature même du Foiler apparait en vraie grandeur.
En mode Foiler, l’Altitude de Vol, c’est-à-dire l’âme même du Foiler, est intrinsèquement liée à la vitesse. Certes on peut compenser une baisse de vitesse momentanée par une augmentation du cambrage du foil (Flap) ou si cela est techniquement possible par une augmentation de l’incidence du Foil.
Mais cette adaptation est très limitée, car à trop en faire, on risque le décrochage.
La deuxième solution serait d’accélérer pour retrouver plus de portance, mais un système vélique n’a pas vraiment de réserve de puissance disponible qui plus est, instantanément.
De plus les Foilers naviguant avec un vent apparent supérieur au vent réel, un déséquilibre des deux vecteurs, vent vitesse et vent réel, impose une adaptation immédiate du réglage des voiles, ce qui est compliqué, même si les Foilers évoluent pratiquement en permanence en régime laminaire.

En fait autant, le réglage des Flaps ou même directement de l’incidence des foils ou du PHR peuvent être asservis, donc intégré dans un soft qui gère le vol, autant, en mode PA, le réglage (et l’adaptation) de la vitesse parait très difficile, voire impossible à réaliser.
Un ordre de grandeur :
Une baisse de vitesse de 25 à 24 nœuds soit 4%, produit une chute de la portance (à incidence égale) de 7.8%.
3-3 L’acquisition des données nécessaires au « Vol »
Il y a deux familles de données :
- Les données internes au Foiler
- Les données relatives à l’environnement.
Les données internes :
Ce sont celles qui sont collectées à partir des capteurs installés sur les appendices, les équipements, les structures.
Les données externes :
Pour certaines données l’acquisition ne pose pas de problèmes :
- Les données GPS
- Le cap
- L’anémomètre, la girouette
- Le speedomètre (pour le régime archimédien)
- Les accélérations dans les 3 axes (accélérations linéaires et en rotations)
- Les assiettes (TRIM) longitudinale et transversale
Pour d’autres cela peut devenir très compliqué
- L’altitude de vol est très difficile à quantifier car la plateforme n’est pas toujours horizontale et aussi parce que la surface de l’eau est loin d’être un plan.
- L’état de la mer devant « l’étrave ». Des systèmes embarqués de reconnaissances et de quantifications des formes du plan d’eau (situé devant le Foiler) par caméra numérique ou balayage laser existent.
Ces technologies embarquées sont souvent encore à l’état de prototypes, mais demandent des moyens techniques à la fois hors de prix et/ou énergivore.
Il est évident qu’une bonne connaissance du terrain dans lequel le Foiler évoluera dans une ou deux secondes est indispensable. A 30 nœuds un Foilers parcourt 15,4 m à la seconde, cela suppose une très grande réactivité du système de détection et d’analyse.
Seul les Foilers motorisés peuvent passer en force, un Foiler vélique est handicapé par sa sous- motorisation (le vecteur portance des voiles n’est dans la sens de la trajectoire) et aussi par le manque de réactivité des voiles et des systèmes mécaniques (et humain ?) qui règlent les différentes voiles.
4- Conclusion
Le pilotage d’un Foiler parait être étroitement lié aux capacités neuronales du pilote (et de l’équipage).
En effet le nombre d’informations à ordonner, à traiter ainsi que les décisions à prendre, en un temps hyper court, parait dépasser les capacités du cerveau humain.
Il faut noter que l’élément qui parait rendre inopérant les résultats des décisions prises par le pilote, est uniquement temporel.
Certaines personnes possèdent des capacités neuronales plus développées que d’autres, comme c’est le cas pour les capacités physiques. Mais il est certain que c’est la vitesse et l’afflux de données à traiter qui sature les « capacités du cerveau ».
Les neurosciences peuvent-elles nous aider à développer nos capacités cérébrales, voire à en créer de nouvelles et combler ce déficit décisionnel ?
On lit des communications scientifiques qui évoquent des recherches de techniques biomédicales regroupées sous le terme de « neuro-amélioration ». Surprenant, est-ce une nouvelle forme de dopage ?
Cela me rappelle une lecture de jeunesse, « Le meilleur des mondes » d’Aldous HUXLEY ou l’auteur, en évoquant les « bébés éprouvettes » recommandait, pour la formation des pilotes d’avion de combat, de retourner tous les jours l’éprouvette afin de les habituer à avoir la tête en bas…
Par Jean Sans.
II – Méthodologie de développement du pilote automatique d’un voilier type « Foiler » (R. LAINÉ)
Une fois posée la problématique du pilotage automatique d’un Foiler, il faut aborder la question suivante : comment développer efficacement le pilote automatique ?
1- Les bases du pilotage d’un Foiler
1.1 Cas d’étude simple
Prenons comme cas d’étude, un Foiler équipé de 4 foils porteurs (2 foils dans l’axe essentiellement pour pouvoir tenir l’assiette longitudinale et l’altitude et 1 foil de chaque côté pour contrer la force aérodynamique de la voilure et assurer la stabilité latérale).
Le foil arrière fera aussi office de safran, bien que ceci puisse aussi être assuré par le foil avant et même partiellement par les foils latéraux.
Ce type de plateforme est plus stable que celle des AC75, et étant plus stable elle sera plus « facile » à piloter.
Pour simplifier la propulsion sera assurée par une aile unique, dont la portance (réglage de l’incidence) sera régulée par rotation autour de l’axe vertical.
Pour maintenir l’équilibre stable en vol il faut deux conditions :
- Que la somme vectorielle des forces qui interagisse sur le Foiler soit nulle.
- Que la somme des moments de chacune des forces (ci-dessus) par rapport à un point quelconque soit aussi nulle.
Les forces sont celles générés par les foils, la voile, la gravité qui s’exerce sur la masse totale du Foiler.
Si ces deux équilibres sont rompus, le Foiler va : ou accélérer, ou ralentir, ou monter, ou descendre, ou tourner, ou chavirer etc. En fait, le déséquilibre (la variation d’une seule force suffit pour causer ce déséquilibre) va amener le Foiler à se mouvoir selon un ou plusieurs des 6 degrés de liberté.
Il faut aussi garder à l’esprit que la vitesse du Foiler est le paramètre déterminant dans l’équilibre du vol. La raison est que la portance « hydrodynamique » d’un foil ou « aérodynamique » d’une voile varie avec le carré de la vitesse.
Passer de 10 à 12m/s augmente la portance de 44% alors que la vitesse n’augmente que de 20%.
Mais une fois l’équilibre du Foiler atteint à l’instant « t », il faut l’adapter immédiatement et rapidement aux variations du vent (force et direction) comme aux conditions de mer et implicitement aux conditions de portance et cela à l’instant suivant « t’ » (t’= t + ε).
En effet si aucune action n’est lancée dès que le Foiler rencontre une vague, il va buter dedans, donc ralentir et obligatoirement retomber brutalement derrière la vague.
Comme il est impossible de maîtriser les fluctuations du vent et les vagues, il ne reste comment variable d’ajustement que l’incidence de la voile par rapport au vent afin de maintenir la vitesse (qui assure la portance), et l’incidence des foils pour maintenir le Foiler hors de l’eau.
Ces multiples réglages en permanence interconnectés, devront être continuels et d’autant plus rapide que la vitesse du Foiler sera élevée.
1.2 Quelques ordres de grandeur
Chiffrage de l’ordre de grandeur des variations de portance nécessaires afin de suivre la surface de la mer à une altitude la plus stable possible.
Hypothèse d’un cas théorique :
- Houle sinusoïdale dont l’amplitude est h =1m (soit 2 m entre le haut et les creux) avec une longueur d’onde L=100m
- Foiler : longueur 20m, masse 6500 kg, inertie au tangage 200 000 kg·m²
- Vitesse du Foiler face à la houle : Vx=20 m/s (40 nœuds).
La période de houle vue par le Foiler est égale à :
T = L/Vx = 5s, ce qui correspond à une pulsation ω = 2*PI / T = 1,256 rd/s.
Sur la base d’un Vol à une altitude constante au-dessus de la surface de l’eau, en « épousant » la houle, le centre de gravité suivra une variation temporelle verticale de la forme : z = h * Sinus (ω * t)
L’accélération verticale au centre de gravité est donc de la forme : γz = -h * ω2 * Sinus (ω * t).
La valeur maximale de cette accélération sera de : h * ω2 = 1,579 m/s2. Soit γzMax= 0.16 g.
On revient maintenant à la portance effective des foils :
- Sur eau plate, pour extraire le Foiler de l’eau, il faut produire une portance Fz = 6500 * 9,81 = 63765 N.
- Pour « escalader » la houle il faut une portance Fzmax = 6500 * (9.81+1,579) = 74 028 N
- Pour « descendre » la houle il faut une portance Fzmin = 6500 *(9.81-1,579) = 53 501 N
On remarque que dans ces conditions le pilote automatique devra changer l’incidence des foils afin d’obtenir une variation cyclique de portance totale de ± 10 263 N avec une période de 5s.
Toujours dans ce cadre de houle théorique, il faut s’intéresser à la rotation en tangage (autour de l’axe transversal) nécessaire pour que l’avant et l’arrière du Foiler conservent une altitude constante par rapport à la surface de l’eau.
- La pente maximale de la houle est égale à : h * (2*PI / L) = 0.1256 radians
- L’accélération angulaire maximale sera : w’’ = 0.1256 * ω2 = 0.198 rd/s2
- Le couple de tangage nécessaire pour obtenir cette accélération angulaire est égal à :
C = I * w’’, ou I est le moment d’inertie du Foiler (ou quadratique) en tangage.
Cela donne : C = 39 600 N.m.
Sur ce modèle de Foiler, équipé d’un foil AV et d’un Foil AR, la distance entre foils est de 15m.
Dans cette condition de vol, la différence de portance à appliquer entre les foils AV et AR sera de 63200 / 15 = 2 640 N, différence qui devra être décalé de 1/4 de période par rapport à la houle.
On voit dans cette hypothèse relativement simple (une « bonne houle mathématique »), que le pilotage des foils porteurs AV et AR apparait déjà complexe puisqu’il faut appliquer sur ces foils AV et AR des variations alternatives d’incidence synchrones afin de faire monter et descendre le Foiler. Et ces manœuvres doivent être répétées toutes les 5 secondes (Période de la houle : T = L/Vx = 5s).
Mais tout ce calcul n’est valable que dans l’hypothèse où la vitesse reste constante pendant tout le cycle de 5s (Période de la houle).
1.3 La relation entre portance et trainée
Toute variation de la portance d’un foil est réalisée soit par changement de son angle d’incidence soit par sa cambrure, avec comme corollaire que cette modification de portance se traduit par une variation de la traînée correspondante du foil.
Le problème est que la relation entre la traînée et la portance n’est pas linéaire. Autour du point moyen de portance, la traînée varie pratiquement avec le carré de la portance.
Autrement dit : lorsque l’on demande un surcroît de portance, la traînée augmente plus qu’elle ne diminue lorsqu’on impose une réduction de portance.
Au total, si la portance varie cycliquement (nécessaire pour suivre la surface de la houle), la traînée totale sera nettement supérieure à la traînée qui correspondrait à la portance moyenne sur eau plate. Il faut donc prévoir que la voilure puise fournir la surpuissance nécessaire pour compenser la variation de traînée. Mais si on garde en permanence cette surpuissance, il y aura une survitesse dès que le Foiler rencontrera une ou deux vagues moins hautes que les précédentes. On comprend qu’il devient donc nécessaire de moduler la puissance de la voilure en fonction de la hauteur de la houle.
1.4 Voir avec un « œil » d’avance…
La problématique est la suivante : La surface de la mer n’est pas une onde sinusoïdale théorique donc la pente de cette surface va être mathématiquement imprévisible. Quelle sera la forme de la surface de la mer lorsque le Foiler escaladera la houle et franchira la crête ?
Mesurer à l’instant « t » la hauteur de vol au-dessus de l’eau à l’avant et à l’arrière, est nécessaire, mais ces paramètres ne sont utiles qu’à cet instant « t ».
Extrapoler à partir des derniers instants pour anticiper la situation à l’instant « t + 1 » revient à faire un pari très incertain dès que la mer est très agitée et encore plus au sommet de la vague qui peut présenter une discontinuité notoire.
Donc, pour assurer la stabilité de vol, la connaissance de la pente de la houle devant le bateau et de l’autre côté de la ligne de crête est indispensable afin d’anticiper la rotation en tangage nécessaire en plus de l’accélération verticale à donner pour éviter de planter le nez du Foiler dans la houle.
On comprend que toute observation prise au niveau du pont ne donnera pas d’information sur ce qui se passe de l’autre côté de la crête de la houle, il faut élever l’élément détecteur pour voir l’état réel de la mer.
Apparaît ainsi la nécessité de disposer sur le mât d’une caméra, ou d’un LIDAR (télédétection par laser) ou encore d’un radar afin de cartographier la forme de la houle que le Foiler va rencontrer à « t+ 1 », de l’autre côté de la crête.
BILAN :
Les actions nécessaires au pilotage en 3 dimensions nécessitent que le pilote et ses équipiers traitent et interprètent dans un espace-temps hyper court le « volume » d’informations qui vont affluer en régime continu depuis les divers capteurs.
Le temps de réponse moyen d’un humain est de 0.2s (à 40 nœuds, soit 20 m/s cela représente du déplacement de 4 m).
Les calculs présentés ci-dessus montrent que le pilotage nécessite des ajustements cycliques des réglages dont la période est de 5 secondes. Cela induira que l’humain aura un retard de phase d’au moins 15° dans chacune de ses décisions.
Force est d’en déduire que le pilotage entièrement manuel est en pratique impossible.
Mais cela sous-entend aussi que les données collectées par les capteurs soient cohérentes et surtout fiables, ce qui n’est pas évident à réaliser lorsque les capteurs sont implantés sur une plateforme très peu stable.
Par exemple, prenons cette plateforme de 20 m équipée d’un mat de 25 m, où est installé en tête de mat, une source détectrice qui vise à 75 mètres devant l’étrave (angle plongeant de 71°).
Un moment de tangage de 1°, génère à 75 mètres un « glissement » de la visée de l’ordre de 7 mètres. Et encore cette hypothèse ne prend pas en compte la déformation du mat que ce soit en dévers, en cintrage.
Il faudra que le capteur soit gyrostabilisé ou plus probablement qu’il intègre une centrale inertielle pour corriger les données des mesures.
Cela montre que la fiabilité des données reçues devra être excellente si on veut un vol stable sans incident.
- Quid d’un système de pilotage ?
Les Modes de réglage des incidences
Un Foiler lorsqu’il est en vol dépend de deux paramètres :
- La vitesse de vol (puissance vélique)
- La portance fournit par les foils (Lift)
La vitesse de vol :
Sur un Foiler vélique, la puissance disponible peut-être modulée en ajustant l’angle d’incidence sur la voile par rapport au vent apparent.
Le pilote dispose de deux méthodes, soit agir sur le réglage de l’écoute de voile soit modifier le cap du bateau.
La première méthode demande beaucoup d’énergie et son temps de réponse est très important.
La seconde méthode en agissant sur la barre est par contre très réactive et surtout peu énergivore.
Le pilote automatique devra donc conçu sur ces deux bases :
- Agir sur la barre pour les ajustements rapides et de faible amplitude de l’incidence de la voilure.
- Activer des vérins ou des motorisations puissants afin de border/choquer le plan de voilure, lorsque le réglage doit être plus important.
La modulation de la portance :
Trois méthodes sont possibles :
- Soit on agit directement sur l’orientation du foil autour d’un axe perpendiculaire au profil.
Cette rotation peut être réalisée avec un vérin, mais cela demande de l’énergie. Il aussi possible d’utiliser un système de « Trim-tab » très peu énergivore (système utilisé sur certains avions pour l’empennage arrière).
- Soit on agit sur la forme du profil du foil. On utilise alors un volet de bord de fuite qui modifie la cambrure du foil
- Soit on agit sur le cabrage de la plateforme. C’est plus délicat et l’amplitude de la modification de l’incidence est plus faible. En fait on utilise le plan régulateur arrière pour enfoncer ou soulever l’arrière du Foiler.
Il faut garder à l’esprit que le temps de réponse de tous ces actionneurs doit être inférieur à 0.1s afin de maîtriser le Foiler lorsqu’il est lancé à 20 m/s (40 nœuds) dans une houle raisonnable.
3- Méthodologie de développement
On aura compris que l’enjeu majeur du pilotage automatique d’un Foiler se situe dans la variabilité de l’environnement dans lequel le Foiler évolue, c’est à dire la variabilité du vent et surtout celle de la surface de la mer.
A partir de ce constat, deux options sont envisageables pour développer un pilote automatique.
3.1 Cycle de développement classique dans le nautisme
On conçoit et calcule le bateau, sa voilure, ses foils avec les connaissances du moment ;
- On demande à des électroniciens et informaticiens de concevoir un pilote automatique et d’évaluer la puissance nécessaire pour le rendre opérationnel.
- On lance une campagne d’essais en mer sur le premier bateau afin d’ajuster les paramètres du pilote automatique et vérifier son comportement dans des conditions plus ou moins représentatives mais en préservant le matériel.
- En cas de désordres ou de bugs, retour à la case conception afin d’envisager une autre combinaison du trinôme : FOILS-VOILURE-PILOTE, etc. Cette opération n’est pas évidente car n’ayant que quelques cas de test, il est complexe de déduire toutes les bonnes évolutions à réaliser.
- Au final, le meilleur réglage possible est mis en place pour différentes conditions sélectionnées, en intégrant les limites à ne pas dépasser.
Comme on n’a pas pu explorer physiquement tous les cas possibles, on peut être conservateur et rester loin des limites afin d’assurer la sécurité, ou alors être plus joueur en faisant des hypothèses sur la marge restante au-delà de ce qui a été réellement essayé.
- Il arrive qu’à la fin le bateau soit ce que les anglo-saxons appellent un « lemon» (un « loupé »), reste alors à trouver un client pour le racheter, et concevoir le bateau suivant sur la base des leçons apprises…
3.2 Cycle de développement des systèmes complexes
Le Foiler est compris comme étant un système complexe car les interactions sont trop imbriquées pour être traitées de manière isolée, par exemple, le bateau d’un côté, ses foils d’un autre côté, idem pour la voilure, le pilote automatique et l’énergie.
- Dans ce cas on commence par développer un simulateur numérique de l’environnement que verra le bateau. Ceci permettra de simuler tous les états possibles de la mer et du vent. Sur ce simulateur d’environnement on greffera un modèle numérique du système complexe, dans notre cas le Foiler ;
- Ensuite on développe un modèle numérique du Foiler qui comprend bien sûr les modèles de coque, de voilure, des foils, le calculateur du pilote et ses algorithmes ainsi les vérins de réglage. Étant donné la vitesse de l’engin, il faudra porter une grande attention à ce que ce modèle numérique soit bien représentatif de la vitesse des actionneurs permettant d’ajuster les incidences sur les foils et la voilure ;
- On mène des campagnes d’essais sur le simulateur complet (environnement + Foiler) pendant lesquelles on va explorer aussi bien les conditions normales que les conditions limites et dégradées, conditions que l’on espère ne jamais rencontrer. Tout ceci afin de déterminer en toute sécurité le comportement du Foiler, les efforts sur les points critiques et la stabilité du pilote automatique dans ces conditions extrêmes ;
- Si ce n’est pas concluant, on retourne à la case développement du modèle numérique du Foiler pour changer coque, foils, voilure, vérins et les algorithmes du pilote, pour ensuite repartir sur une nouvelle campagne d’essais sur le simulateur. Cette boucle est répétée autant de fois que nécessaire pour trouver le design optimum, sans faire prendre de risque à un équipage, ni avoir à fabriquer coque, foils, voilure, etc ;
- Un fois que l’on a exploré tout le domaine d’environnement, on est sûr d’avoir identifié tous les efforts induits aussi bien par l’environnement que par le pilote automatique (les changements rapides d’incidence sur les foils induisent des efforts dynamiques conséquents) et on peut passer en toute sérénité à la conception détaillée du bateau et ses appendices. On aura aussi identifié l’énergie nécessaire à tout instant pour les actionneurs, ce qui permettra d’optimiser sa génération et son stockage.
- La fabrication du bateau et du pilote automatique se font alors sur la base de spécifications claires et validées par les essais sur simulateur. De même écrira le manuel d’utilisation qui comportera des procédures claires à suivre en mode dégradé. Un entraînement de l’équipage sur le simulateur leur donnera confiance dans les capacités du bateau.
- Les essais à la mer porteront essentiellement sur la vérification que le Foiler réalisé se comporte bien comme prévu. On ne cherche pas à aller aux limites qui ont déjà été explorées sur le simulateur.
4- Conclusion
L’arrivée des Foilers dans le monde de l’hyper compétition va contraindre ces équipes à basculer dans un environnement proche des industries de pointe, lequel utilise déjà largement la méthodologie de développement des systèmes complexes.
Les Nouveaux Zélandais ont déjà utilisé une telle méthodologie pour mettre au point les AC de la génération précédente, gageons que tous les challengers font de même sur les AC75.
Finalement faire des simulations avant de construire un bateau coûte probablement moins cher que d’avoir à en faire un second pour corriger les défauts du précédent.
Franchir le pas de la simulation est surtout faire un pas intellectuel qui sort les concepteurs de leur zone de confort.
Par Robert Lainé.